RESEARCH
SLAM Group
SLAM GROUP - OVERVIEW
Mission Statement
"Our group focuses on pioneering research to enhance SLAM, hardware, autonomous driving, and 3D reconstruction with the goal of developing advanced technologies that enhance the safety, efficiency, and dependability of autonomous system."
Research Interests
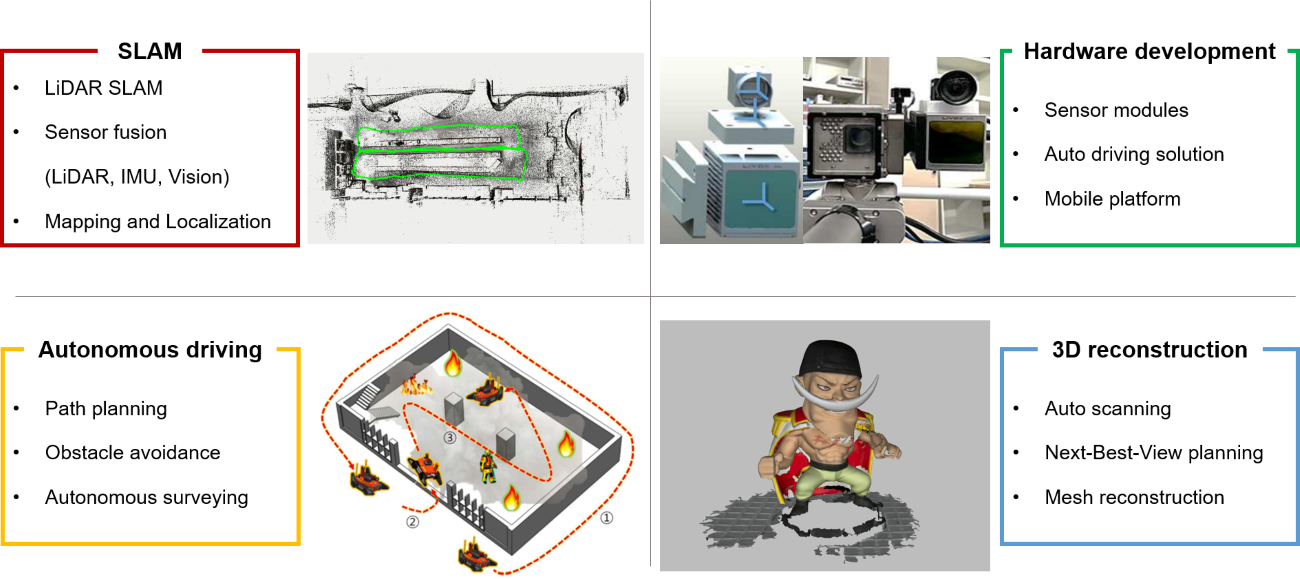
- Simultaneous localization and mapping (SLAM)
- Hardware development
- Autonomous driving
- 3D reconstruction
Our detailed Works
1. Simultaneous localization and mapping (SLAM)
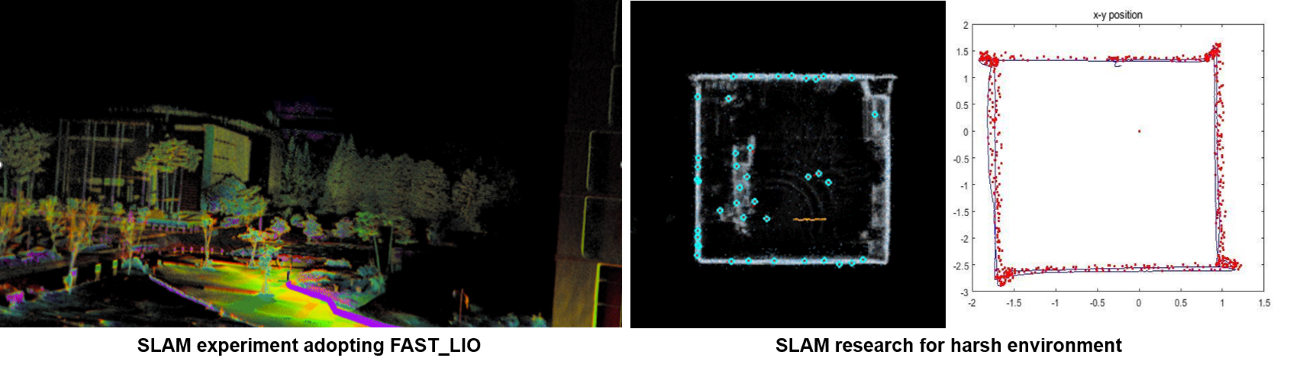
SLAM is a computational challenge that enables robots or autonomous vehicles to map and navigate unknown environments simultaneously using sensor data such as cameras, lidars, or radars. Our research focuses on sensor fusion for SLAM technology, which involves integrating lidar data with other sensor data to produce more accurate maps and enable more reliable navigation.
SLAM is a computational challenge that enables robots or autonomous vehicles to map and navigate unknown environments simultaneously using sensor data such as cameras, lidars, or radars. Our research focuses on sensor fusion for SLAM technology, which involves integrating lidar data with other sensor data to produce more accurate maps and enable more reliable navigation.
2. Hardware development
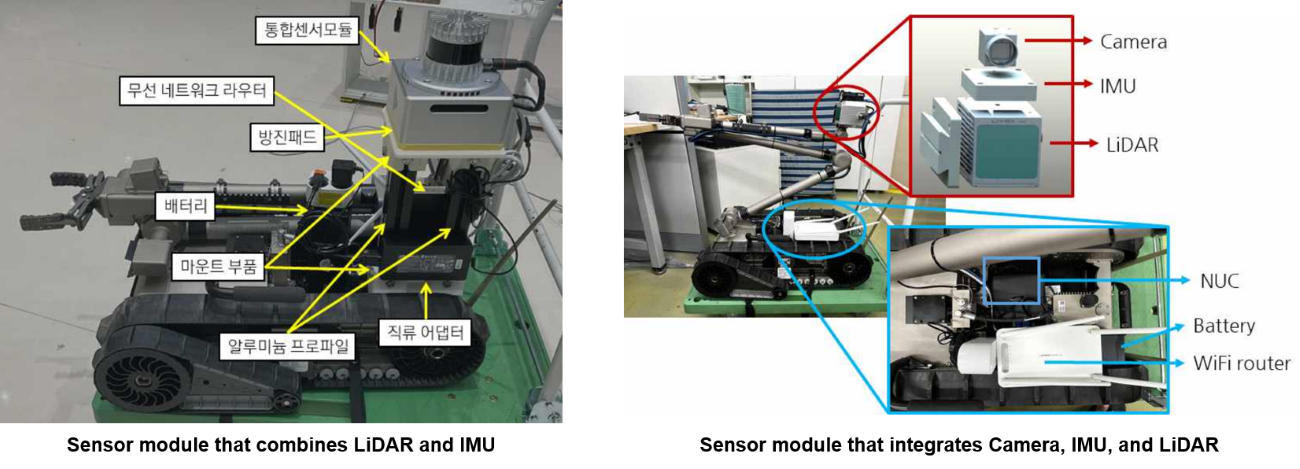
We have constructed hardware components and sensor modules in order to conduct research and practical experiments on SLAM applications. We have developed a sensor module for logging LiDAR and IMU data, as well as a sensor module for integrating various sensors such as radar, camera, and IMU.
We have constructed hardware components and sensor modules in order to conduct research and practical experiments on SLAM applications. We have developed a sensor module for logging LiDAR and IMU data, as well as a sensor module for integrating various sensors such as radar, camera, and IMU.
3. Autonomous driving
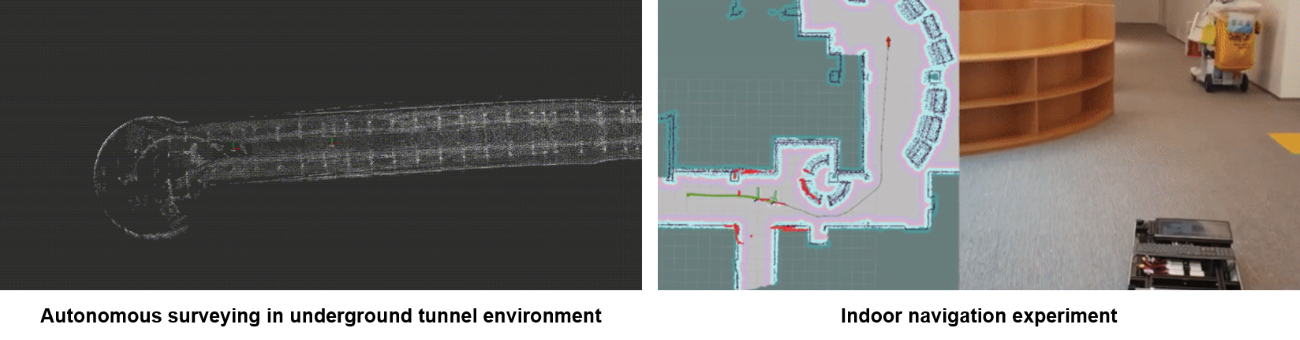
Beyond our SLAM research, we are applying our findings to the development of autonomous driving systems. By utilizing the map, estimated robot pose, and path planning algorithms, we are creating mobile autonomous driving solutions for various environments and purposes, leveraging the advanced capabilities of SLAM technology.
Beyond our SLAM research, we are applying our findings to the development of autonomous driving systems. By utilizing the map, estimated robot pose, and path planning algorithms, we are creating mobile autonomous driving solutions for various environments and purposes, leveraging the advanced capabilities of SLAM technology.
4. 3D Reconstruction
3D reconstruction is the process of creating a digital 3D model of an object or scene using computer vision and graphics techniques, such as SLAM. Our research aims to implement an automatic scanning system for 3D reconstruction using robots, leveraging SLAM technology to recover the 3D geometry and appearance of objects and scenes from 2D images or point clouds in an automated and efficient manner.

3D reconstruction is the process of creating a digital 3D model of an object or scene using computer vision and graphics techniques, such as SLAM. Our research aims to implement an automatic scanning system for 3D reconstruction using robots, leveraging SLAM technology to recover the 3D geometry and appearance of objects and scenes from 2D images or point clouds in an automated and efficient manner.