
RESEARCH
Drone Group
DRONE GROUP - OVERVIEW
ContactE-mail : yoopata@postech.ac.kr
Mission Statement
"We aims to develop fully autonomous palm-sized drones for industrial and military applications by combining a variety of the state-of-the-art control and sensing technologies."
Research Interests
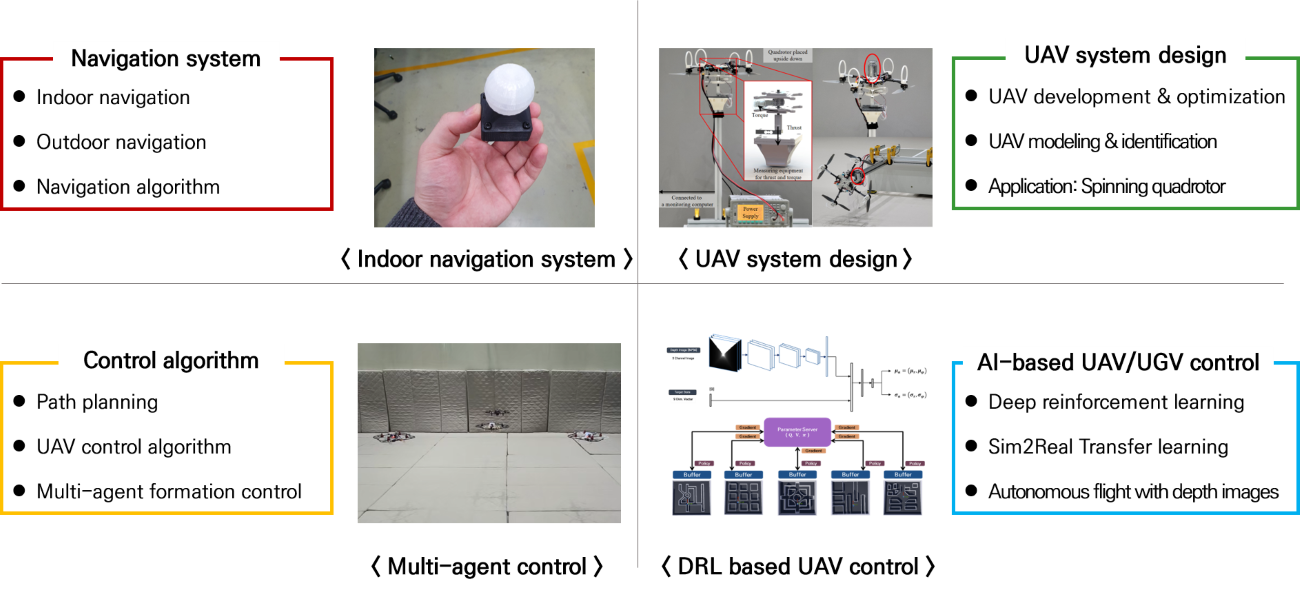
- Indoor navigation system
- UAV system design
- Multi-agent control
- DRL based UAV control
Our detailed Works
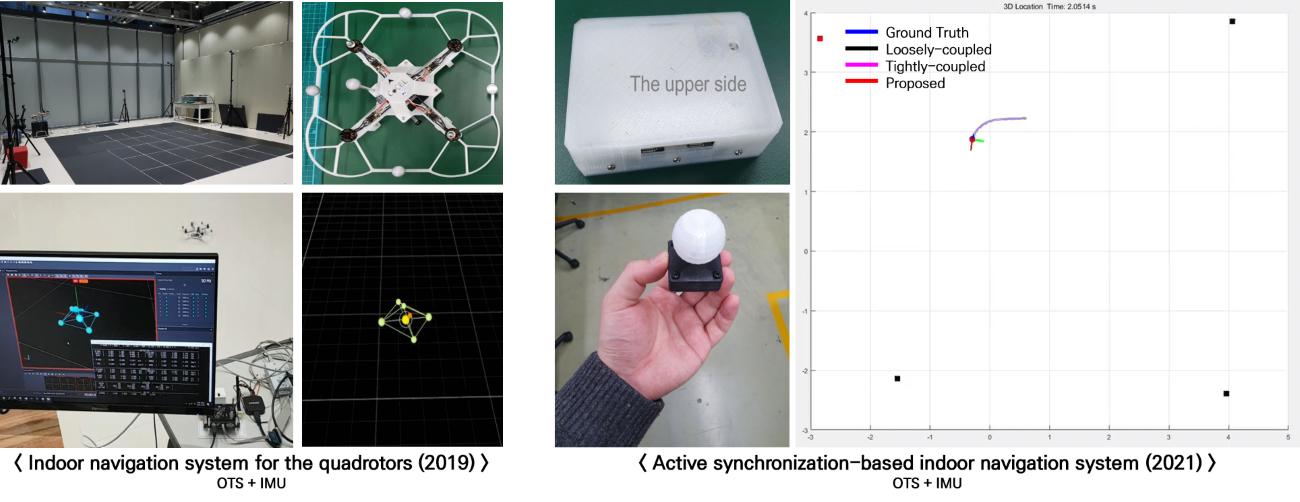
1. Navigation system
The development of navigation system and sensor fusion algorithms is critical for the effective control of drones in both indoor and outdoor environments. Our approach integrates optical motion capture systems for precise indoor navigation and Global Navigation Satellite System (GNSS) for accurate outdoor positioning, ensuring reliable and consistent performance.
The development of navigation system and sensor fusion algorithms is critical for the effective control of drones in both indoor and outdoor environments. Our approach integrates optical motion capture systems for precise indoor navigation and Global Navigation Satellite System (GNSS) for accurate outdoor positioning, ensuring reliable and consistent performance.
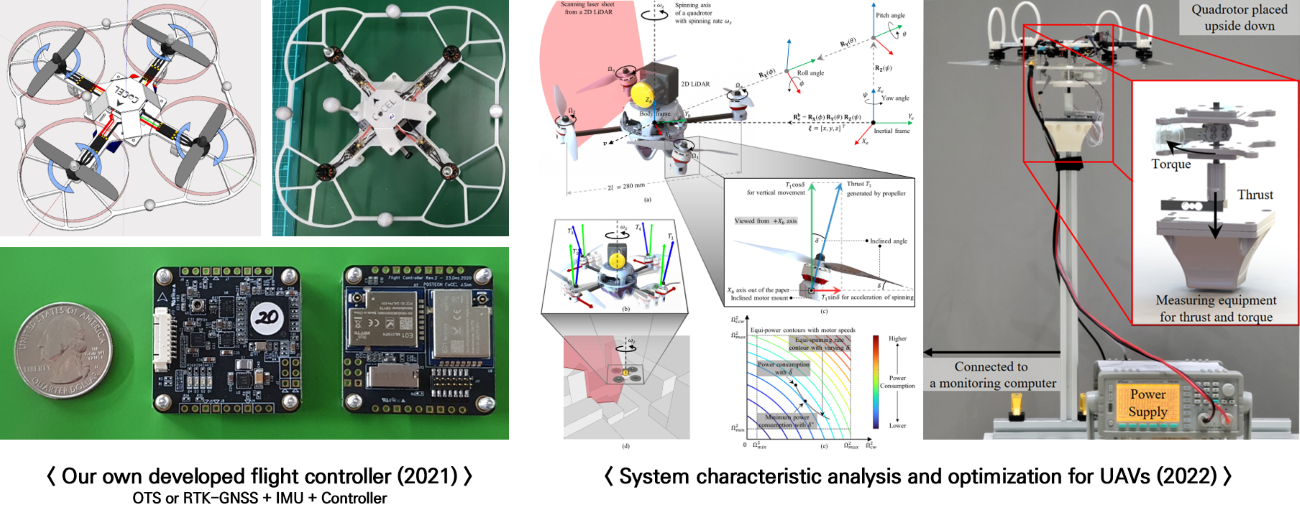
2. UAV system design
Multirotor system is widely used in variety of aerial missions. To find a suitable set of multirotor hardware for each mission, an optimization based design method is developed which maximize flight time under flight scenario of the mission.
Multirotor system is widely used in variety of aerial missions. To find a suitable set of multirotor hardware for each mission, an optimization based design method is developed which maximize flight time under flight scenario of the mission.
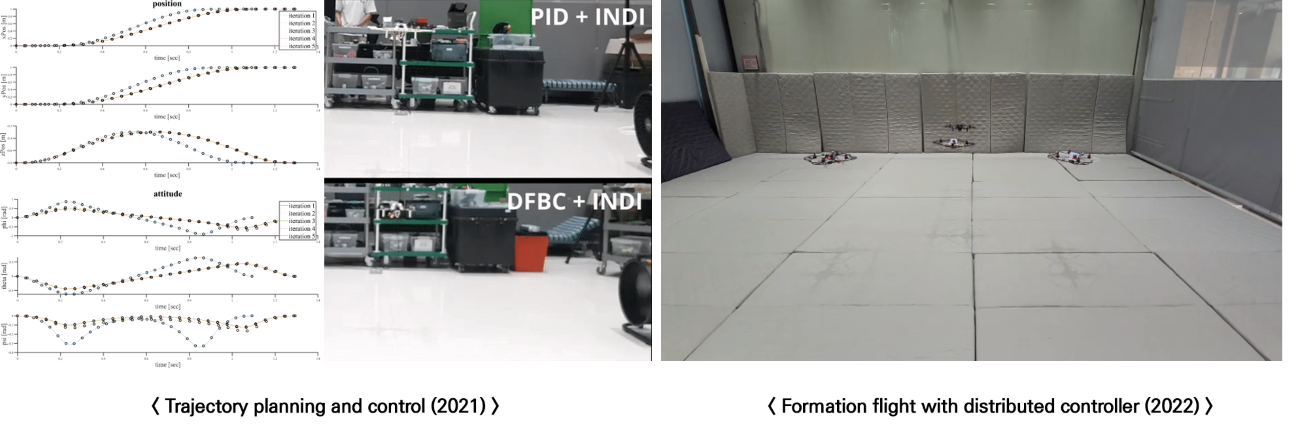
3. Control algorithm
Recently, quadrotors are required to be more robust and agile for application to sophisticated flights and tasks in confined and complex places. According to those demands, we are developing control algorithms for both single and multi-agent drone systems.
Recently, quadrotors are required to be more robust and agile for application to sophisticated flights and tasks in confined and complex places. According to those demands, we are developing control algorithms for both single and multi-agent drone systems.
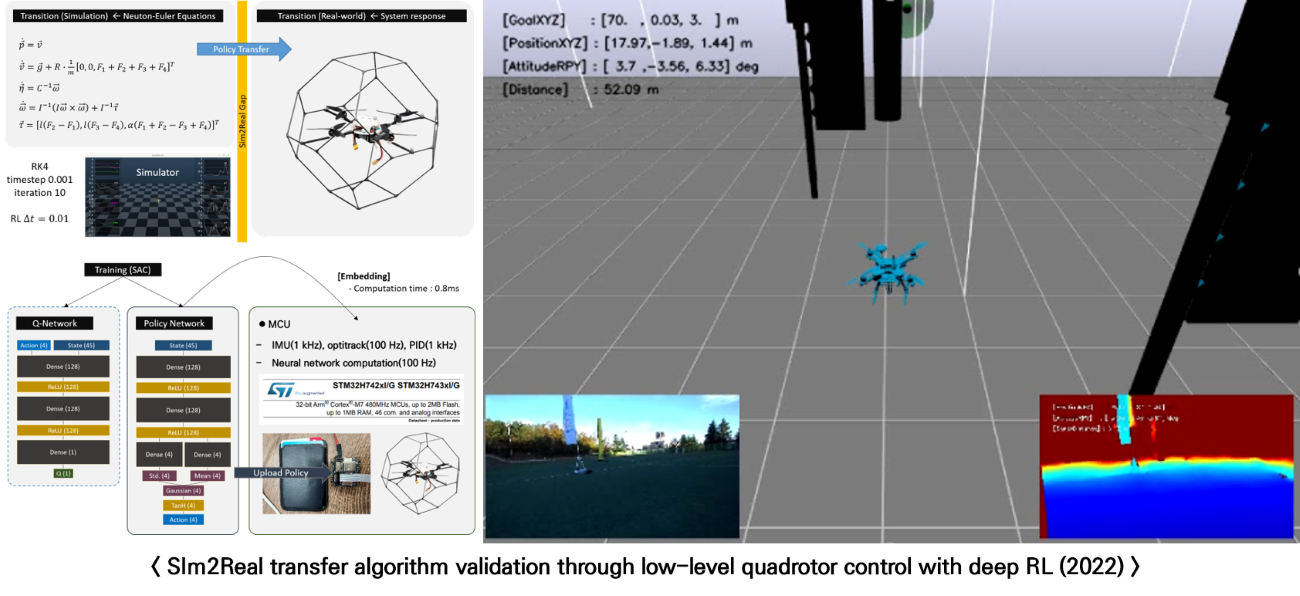
4. AI-based UAV/UGV control
Plant control using reinforcement learning is one of the most prominent control methods these days. The sim2real transfer algorithm, which transfers the policies learned in simulation to actual systems, is a core technology in this field. To ensure more robust and precise control performance, we are researching SIM2REAL algorithms and validating them using drone systems.
Plant control using reinforcement learning is one of the most prominent control methods these days. The sim2real transfer algorithm, which transfers the policies learned in simulation to actual systems, is a core technology in this field. To ensure more robust and precise control performance, we are researching SIM2REAL algorithms and validating them using drone systems.